Flipdot Uhr
die Flipdot Uhr besteht aus zwei Annax Flipdot Modulen. Es wurden die Original Spalten-Treiber Platinen verwendet. Angesteuert von einem Arduino Micro, der das Protokoll der Treiber Platinen nachgebildet.
Robotik, Elektronik, Arduino und mehr

die Flipdot Uhr besteht aus zwei Annax Flipdot Modulen. Es wurden die Original Spalten-Treiber Platinen verwendet. Angesteuert von einem Arduino Micro, der das Protokoll der Treiber Platinen nachgebildet.

Es ist schon eine Weile her (7 Jahre) seit ich eine preiswerte Bluetooth Anbindung für Mikrocontroller wie den Arduino vorgestellt habe. Höchste Zeit für ein Update.
„Preiswerte Bluetooth Anbindung – Teil 2“ weiterlesen
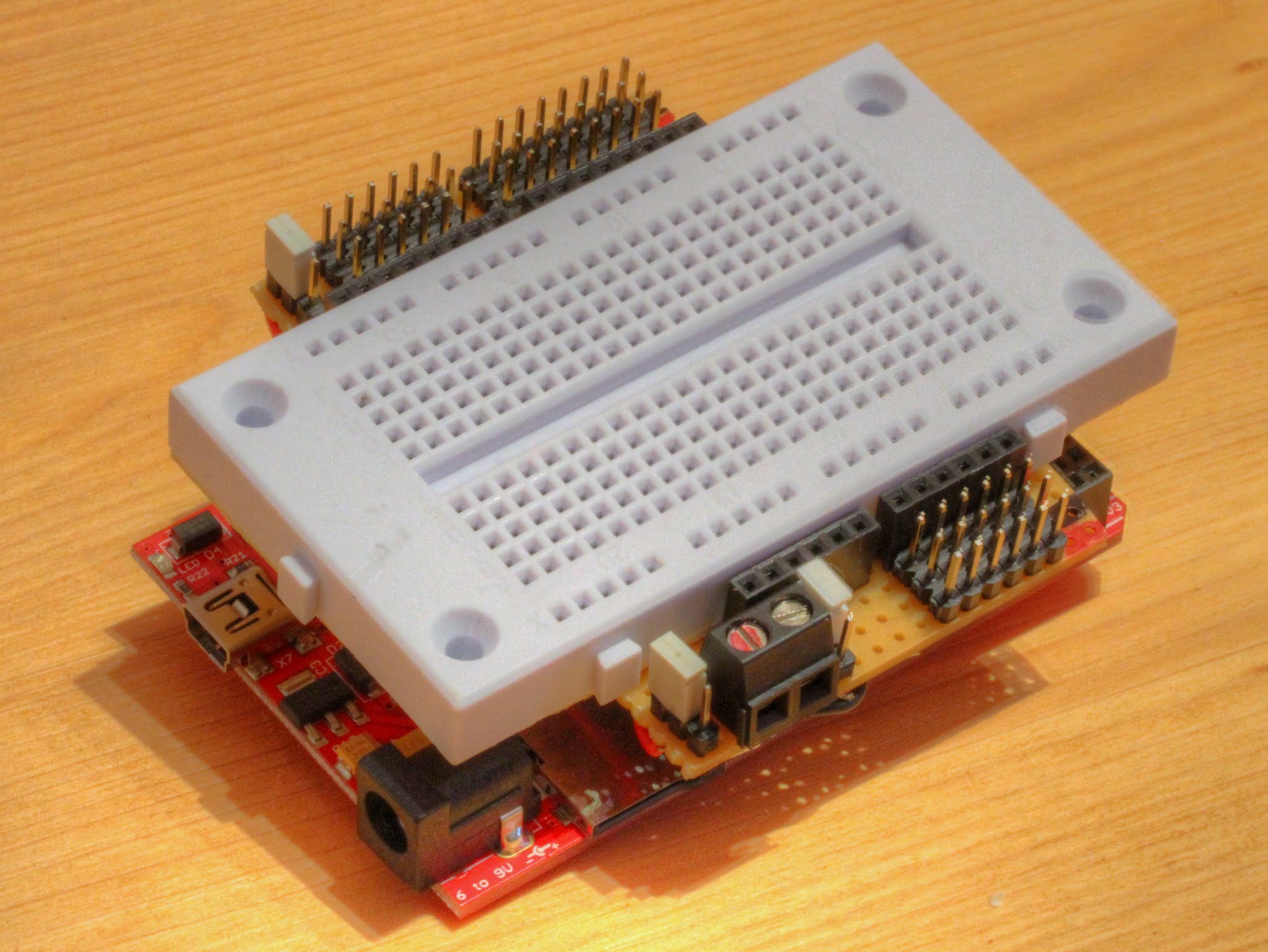
Des öfteren wurde ich gefragt, wie man selbst ein Arduino Shield herstellen kann und was dazu benötigt wird. Für Roboter Projekte verwende ich diese selbstbebauten Shields sehr oft. Sie sind allerdings so universell, das man sie auch für andere Zwecke verwenden kann. Aufgrund des selben Pinouts taugt diese Lösung nicht nur für Arduino, sondern auch für die FEZ Reihe (Panda, Domino), Netduino und andere.
„DIY Arduino / FEZ shield“ weiterlesen
Für mein zweites Hobby, Fotografie, benötige ich ein Intervalometer für Zeitraffer Aufnahmen. Vor einer kompletten Neuentwicklung suchte ich zuerst nach einer fertigen Arduino-basierten Lösung und fand 2 interessante Projekte.
Die Sensoren der Sharp GP2Dxxx IR Familie werden sehr oft als Distanz Sensoren in der Robotik eingesetzt. sie sind preiswert und weltweit verfügbar. Normalerweise werden diese Sensoren für automatische Wasserhähne, Händetrockner und Urinale eingesetzt, weniger für Robotik.

Es gibt folgende Sensoren mit analogem Ausgang:
Wenn man diese Sensoren, bzw. Sensoren mit analogem Ausgang allgemein, in einer Umgebung wie der Robotik einsetzt, muß man mit gestörten Ausgangs Signalen rechnen. Bei den Sharp Sensoren ist es sogar so, das selbst unter optimalen Labor Bedingungen das Asugangssignal gestört ist. Betrachtet man sich da Signal mit einem Ozillokop, sieht man ein verrauschtes Signal mit einer Menge an üblen Spikes.
„Sharp IR Sensor Ausgabe verbessern“ weiterlesen
